 GDU
GDU
 UUUFLY
UUUFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN KIIL
KIIL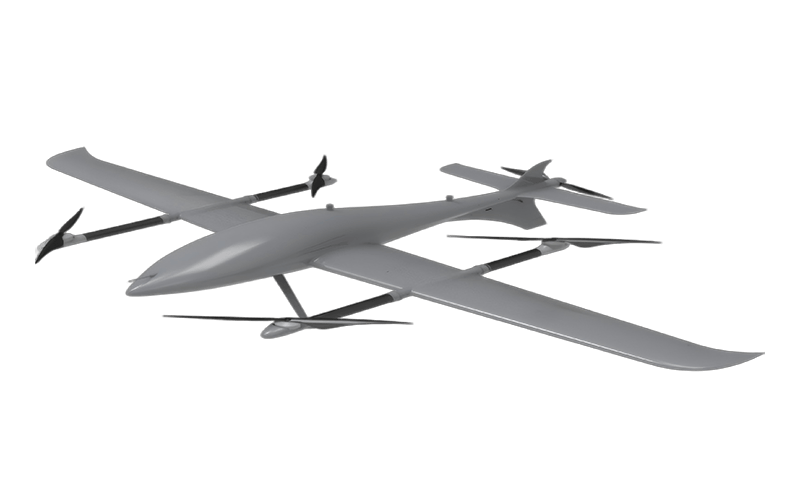 SKY NEXT
SKY NEXT
Dragonfish Standard: järgmise põlvkonna mitme missiooniga eVTOL
Dragonfish Standard mitmekülgne mitmeotstarbeline eVTOL mehitamata õhusõiduk
Tasakaalustatud vastupidavus, paindlikkus kandevõime osas ja kiire kasutuselevõtt tööstus- ja avaliku sektori rakenduste jaoks

Dragonfish Standard mitmekülgne mitmeotstarbeline eVTOL mehitamata õhusõiduk
Tasakaalustatud vastupidavus, paindlikkus kandevõime osas ja kiire kasutuselevõtt tööstus- ja avaliku sektori rakenduste jaoks
Vaikne lend
Dragonfish saavutab ülivaikse lennu tänu oma erakordsele propulsioonisüsteemile ja uuenduslikule mürasummutusdisainile. Vaevu kuuldav üle 120 m kõrgusel maapinnast*, vähendab DF oluliselt avastamise ohtu, tagades samal ajal operatiivse salastatuse.
Lisateave >>

Vaikne lend
Dragonfish saavutab ülivaikse lennu tänu oma erakordsele propulsioonisüsteemile ja uuenduslikule mürasummutusdisainile. Vaevu kuuldav üle 120 m kõrgusel maapinnast*, vähendab DF oluliselt avastamise ohtu, tagades samal ajal operatiivse salastatuse.
Lisateave >>
Suurepärane häiretevastane kaitse
Keerulistes keskkondades säilitab mehitamata õhusõiduk erakordse side- ja videoülekande jõudluse, mida iseloomustab tugev häiretevastane võimekus ning stabiilne ja usaldusväärne edastus.

Suurepärane häiretevastane kaitse
Keerulistes keskkondades säilitab mehitamata õhusõiduk erakordse side- ja videoülekande jõudluse, mida iseloomustab tugev häiretevastane võimekus ning stabiilne ja usaldusväärne edastus.
Miks professionaalid valivad Dragonfish Standardi?

GNSS-i kadude kaitse
Mitte-GNSS keskkondades töötades aktiveerib droon maandumiskaitse, laskudes ohutuse tagamiseks automaatselt oma praegusest asukohast.
Tühja akuga tagastus
Kasutajad saavad maandumiseks oodatavat aku taset kohandada. Mehitamata õhusõiduk arvutab optimaalse tagasituleku ajastuse reaalajas aku praeguse taseme ja lennu oleku põhjal, tagades, et maandub aku tasemega, mis on kasutaja määratud läviväärtuse lähedal.
Kadunud signaali tagasitulek
Kui mehitamata õhusõiduki ja maapealse jaama vaheline signaal katkeb, aktiveerub ühenduse kadumise kaitse. Kui GNSS-signaalid on saadaval, algatab mehitamata õhusõiduk automaatse kojunaasmise.
Avarii käsitsi tühistamine
Hädaolukorras saate kaugjuhtimispuldi igal ajal M-režiimi lülitada, et koheselt käsitsi juhtida, tagades lennuohutuse.

Mitmed koondamised, missiooni ohutuse tagamine
eVTOL-il on mitmetasandiline varundamine põhikomponentide (akud, andurid, sidesiinid) ja autonoomne režiimivahetus, mis tagab stabiilse lennu ja usaldusväärse jõudluse isegi keerulistes keskkondades.
Ühe puudutusega enesekontroll
Teostab enne õhkutõusmist automaatselt süsteemikontrolli, tagades iga lennu ohutuse ja usaldusväärsuse.
Ühe nupuga tagasipöördumine
Avakuva nupu abil on lihtne naasta. Mugav hoiustamine: pärast lendu saab asjad kiiresti korrastada, neid on lihtne hoiustada ja need on järgmiseks kasutuskorraks valmis.
Nutikas jälgimine
Mehitamata õhusõiduk saab lukustada oma sihtmärkidele ja paindlikult oma lennutrajektoori muuta. Toetab mitut jälgimisrežiimi.

Mobiilse platvormi õhkutõusmine ja maandumine
Toetab õhkutõusmist ja maandumist liikuvatel platvormidel.
Dragonfish Dragonfish Standardi spetsifikatsioonid
| Spetsifikatsioon | Detailid |
| Tüüp | Kallurrootoriga mitmemissiooniline eVTOL mehitamata õhusõiduk |
| Mõõtmed | 1948 × 3295 × 520 mm (koos propelleridega) |
| Kaal | 7,5 kg (koos 2 aku ja propelleriga; ilma kardaankinnituseta) |
| Maksimaalne kandevõime | 1,5 kg |
| Maksimaalne lennuaeg | 126 minutit (standardse kasuliku koormuse konfiguratsiooniga) |
| Maksimaalne horisontaalne kiirus | 120 km/h |
| Maksimaalne horisontaalne kiirus | 126 km/h (35 m/s) |
| Maksimaalne tuuletakistus | 15 m/s (fikseeritud tiivaga režiim), 12 m/s (vertikaalne lennurežiim) |
| Maksimaalne teeninduslagi | 5000 meetrit merepinnast kõrgemal |
| Töötemperatuur | -20°C kuni 50°C |
| IP-reiting | IP43 |
| GNSS-i tugi | GPS + GLONASS + BeiDou + Galileo (mitme tähtkuju positsioneerimine) |
| Maksimaalne signaali edastusulatus | 30 kilomeetrit |
| Kasutuselevõtu aeg | ≤5 minutit (tööriistavaba kiirkinnitusega kokkupanek) |
Suuruste võrdlus

Aksessuaarid

Dragonfishi maapealne jaam

Autel Smart Antenna Transmission (ASAT) (valikuline)

Autel Dragonfish Nest (valikuline)

Dragonfishi repiiter (valikuline)
Kohandumistoode

Rannikualade salakaubaveo vastane võitlus

Politsei jõustamine

Metsatulekahjude ennetamine

Elektriliinide kontroll

Liiklusinspektsioon




